Named by combining "Bro" (from Brother, as I consider this robot a sibling in my family) and "tor" (from quadrotor), Brotor represents more than just a research platform - it's a companion in my robotics journey.



As a PhD candidate at Federation University Australia specializing in aerial robotics and AI, I built Brotor entirely from scratch by myself, choosing to develop a custom solution rather than using commercial platforms. The challenge was to create a design that could be rapidly assembled using readily available components, enabling quick iterations and modifications during my research in real-time trajectory planning for cluttered environments.
Every aspect, from frame design to component selection, was carefully considered to create a platform that could withstand rigorous testing while remaining adaptable for research needs. The technical integration leverages ROS (Robot Operating System) for the control stack, incorporating advanced guidance algorithms for autonomous navigation.
All testing is conducted in the Intelligent Drone Laboratory, the first and only indoor flight facility at Federation University that I had established from scratch.



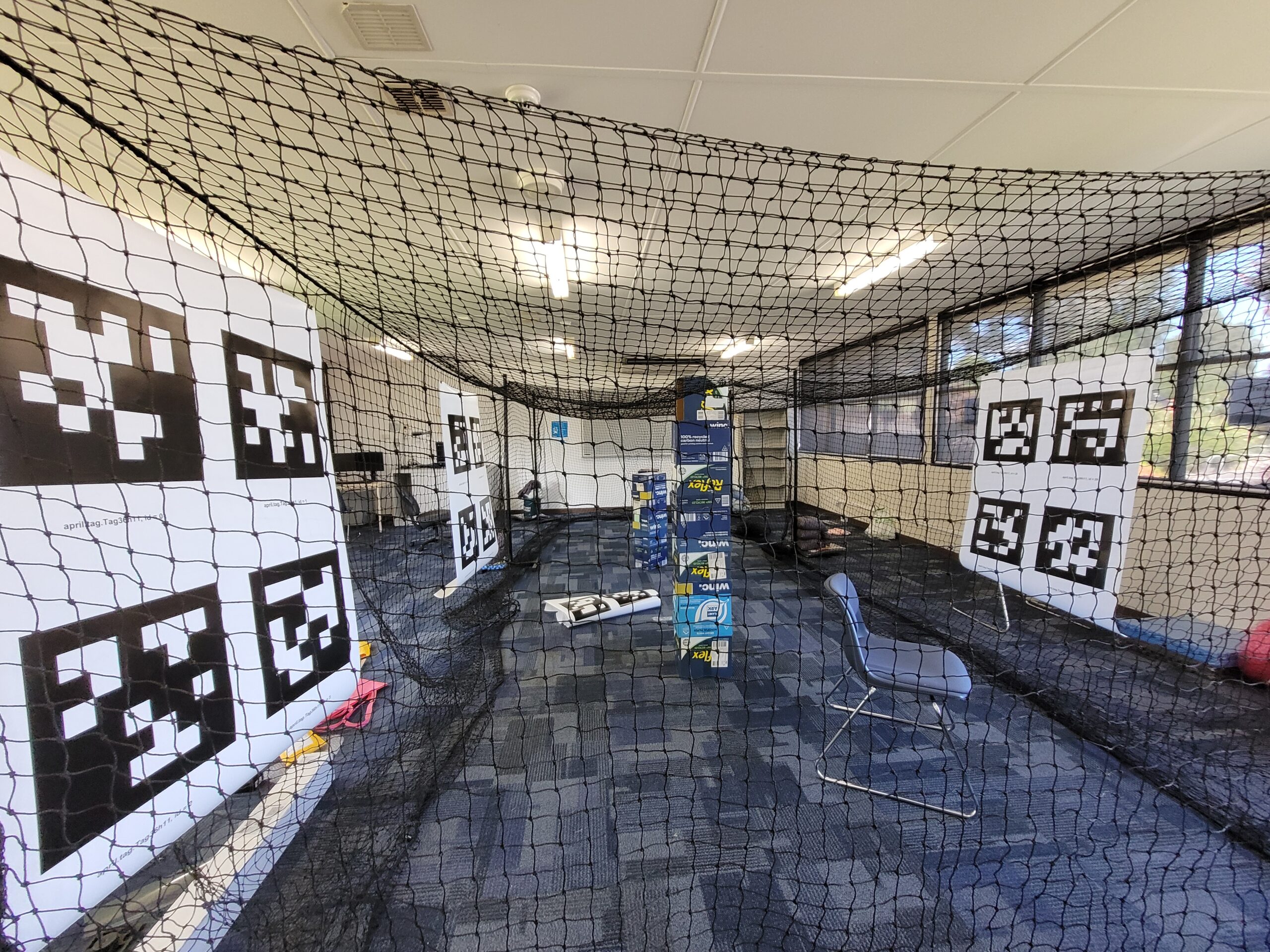

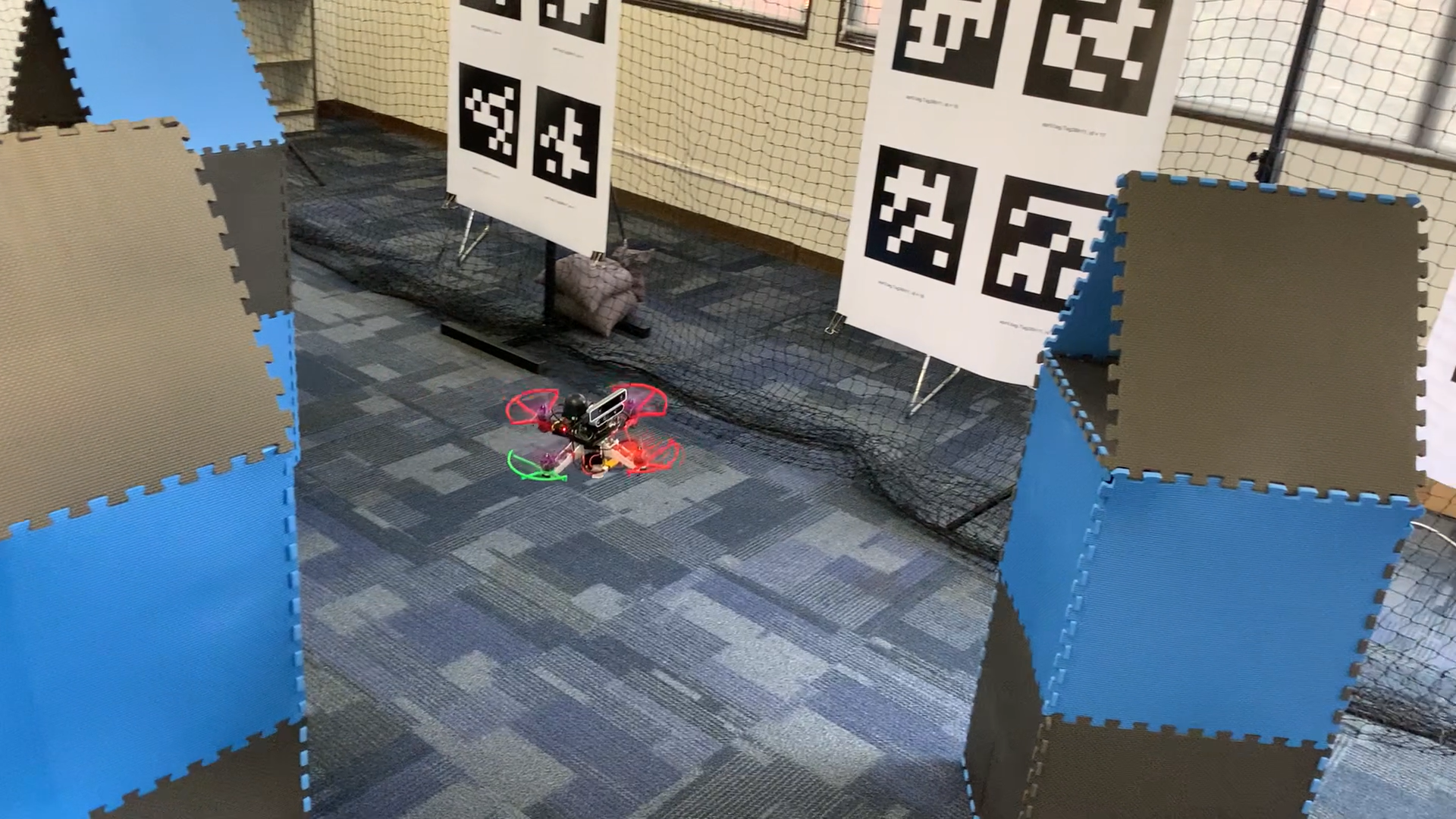
This infrastructure was essential for advancing drone research capabilities, garnered attention from the mainstream media, with features on 7News and the university's website:
- 7News - originally aired around Wednesday, November 5, 2025, at 10:48:00 PM Australian Eastern Daylight Time: storage.googleapis.com/streem-tv-clips-au/2025-11-05/tv_118_1762343316_1762343345.mp4
- Federation University Australia: Indoor flight lab clears the way for advanced aerial robotics
- Federation University LinkedIn
- https://www.linkedin.com/posts/thethaibinh_icuas24-aerial-robotics-activity-7215580933339406336-DM_S/
Brotor represents more than just a research platform, it's a testament to the importance of hands-on, DIY development in robotics research. Through this project, I've been able to advance my PhD work while contributing valuable insights to the field of autonomous aerial systems.
For technical details and documentation, check out my GitHub repositories and research publications.
P/s: I recently built Brotor 330, a successor of Brotor during my tenure at UNSW Canberra for research on robotics decentralized swarming. Interesting findings will be out soon!
